




















Abstract
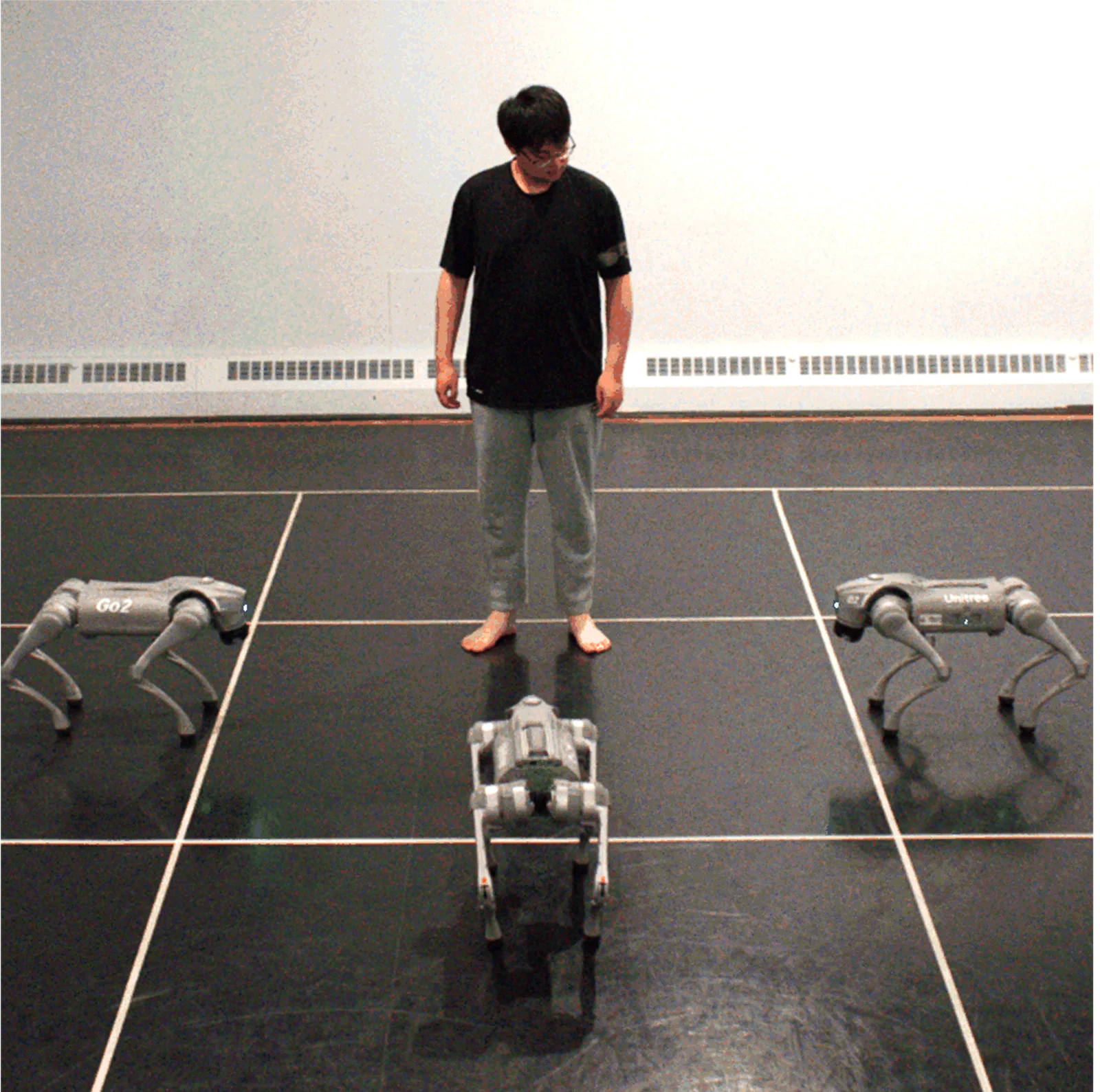
Extended Reality (XR) has advanced audiovisual immersion, yet haptic feedback, especially for the lower body, remains limited. We present RoboHaptics, the first system to explore lower-body haptics using commercial quadruped robots. RoboHaptics leverages its freestanding and reconfigurable nature to deliver both active and passive tactile feedback without requiring worn devices. We contribute a design space for quadruped-mediated haptics, a software toolkit with a programmable library of tactile effects, and empirical evaluations showing that quadruped robots can deliver safe force feedback from 3–28 N (below nociceptive thresholds), reach lower-body locations with precision of 2.1–5.1 mm and accuracy of 3.7–17 mm, and support a wide range of tactile effects. A 12-participant study further revealed significant inputs into how RoboHaptics can be used to increase realism and immersion by providing lower-body haptic feedback. Together, our work establishes quadruped robots as a versatile platform for mobile, off-body haptics in XR.
Reference
Huanjun Zhao, Matthew James Newton, Sutirtha Roy, Aditya Shekhar Nittala. RoboHaptics: Designing Haptic Interactions for Lower Body with Quadruped Robot Dogs. In Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI 2026)ACM, New York, NY, USA Page: 1-19. DOI: https://dl.acm.org/doi/full/10.1145/3772318.3790633