The Way You Move: The Effect of a Robot Surrogate Movement in Remote Collaboration
 Martin Feick,
Martin Feick,  Lora Oehlberg,
Lora Oehlberg,  Anthony Tang, André Miede ,
Anthony Tang, André Miede ,  Ehud Sharlin
Ehud Sharlin
Abstract
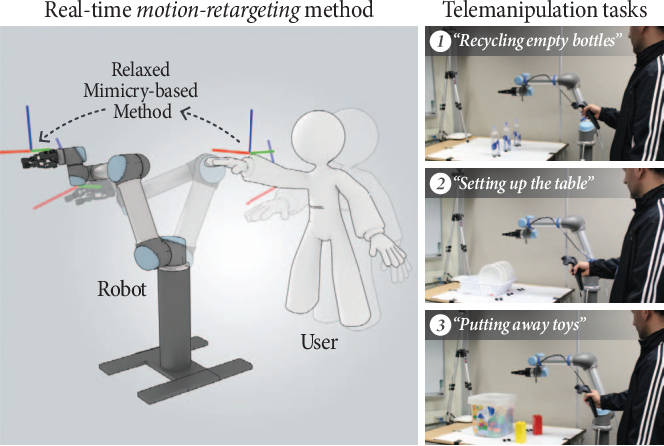
In this paper, we discuss the role of the movement trajectory and velocity enabled by our tele-robotic system (ReMa) for remote collaboration on physical tasks. Our system reproduces changes in object orientation and position at a remote location using a humanoid robotic arm. However, even minor kinematics differences between robot and human arm can result in awkward or exaggerated robot movements. As a result, user communication with the robotic system can become less efficient, less fluent and more time intensive.
Reference
Martin Feick, Lora Oehlberg, Anthony Tang, André Miede, Ehud Sharlin. The Way You Move: The Effect of a Robot Surrogate Movement in Remote Collaboration. In Adjunct Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI 2018)ACM, New York, NY, USA Page: 1-2. DOI: https://doi.org/10.1145/3173386.3176959