Designing Expandable-Structure Robots for Human-Robot Interaction
Hooman Hedayati ,  Ryo Suzuki, Wyatt Rees1 , Daniel Leithinger , Daniel Szafir
Ryo Suzuki, Wyatt Rees1 , Daniel Leithinger , Daniel Szafir
Abstract
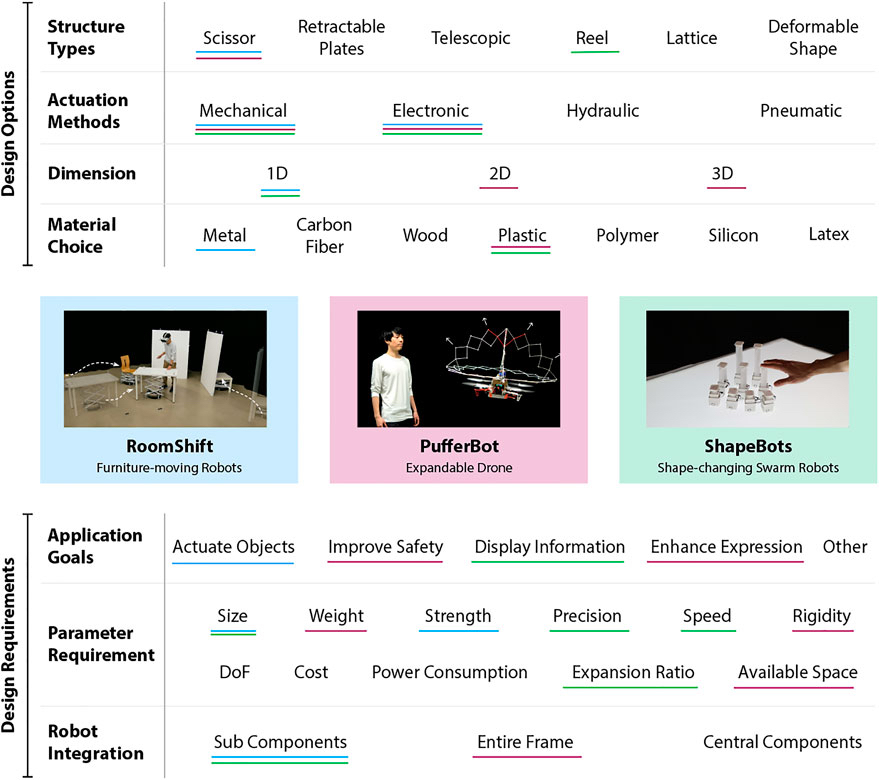
In this paper, we survey the emerging design space of expandable structures in robotics, with a focus on how such structures may improve human-robot interactions. We detail various implementation considerations for researchers seeking to integrate such structures in their own work and describe how expandable structures may lead to novel forms of interaction for a variety of different robots and applications, including structures that enable robots to alter their form to augment or gain entirely new capabilities, such as enhancing manipulation or navigation, structures that improve robot safety, structures that enable new forms of communication, and structures for robot swarms that enable the swarm to change shape both individually and collectively. To illustrate how these considerations may be operationalized, we also present three case studies from our own research in expandable structure robots, sharing our design process and our findings regarding how such structures enable robots to produce novel behaviors that may capture human attention, convey information, mimic emotion, and provide new types of dynamic affordances.
Reference
Hooman Hedayati, Ryo Suzuki, Wyatt Rees1, Daniel Leithinger, Daniel Szafir. Designing Expandable-Structure Robots for Human-Robot Interaction. (Frontiers 2022) Page: 1-22. DOI: https://doi.org/10.3389/frobt.2022.719639