Autonomous Vehicle-Cyclist Interaction: Peril and Promise
Ming Hou,  Karthik Mahadevan,
Karthik Mahadevan,  Sowmya Somanath,
Sowmya Somanath,  Ehud Sharlin,
Ehud Sharlin,  Lora Oehlberg
Lora Oehlberg
Abstract
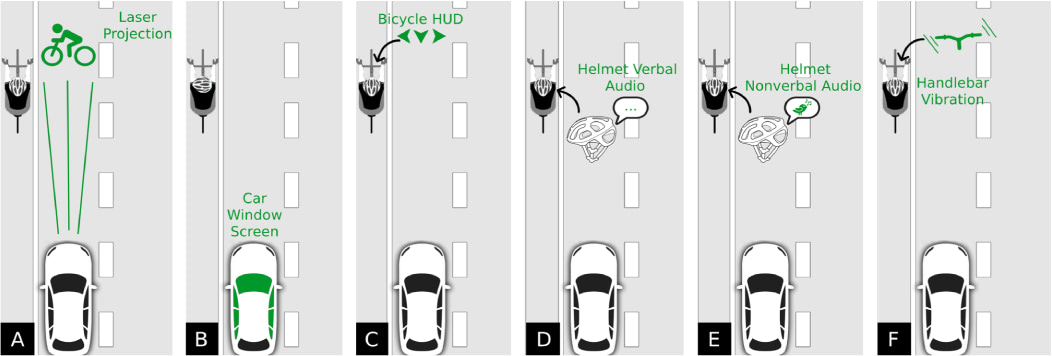
Autonomous vehicles (AVs) will redefine interactions between road users. Presently, cyclists and drivers communicate through implicit cues (vehicle motion) and explicit but imprecise signals (hand gestures, horns). Future AVs could consistently communicate awareness and intent and other feedback to cyclists based on their sensor data. We present an exploration of AV-cyclist interaction, starting with preliminary design studies which informed the implementation of an immersive VR AV-cyclist simulator, and the design and evaluation of a number of AV-cyclist interfaces. Our findings suggest that AV-cyclist interfaces can improve rider confidence in lane merging scenarios. We contribute an AV-cyclist immersive simulator, insights on trade-offs of various aspects of AV-cyclist interaction design including modalities, location, and complexity, and positive results suggesting improved rider confidence due to AV-cyclist interaction. While we are encouraged by the potential positive impact AV-cyclist interfaces can have on cyclist culture, we also emphasize the risks over-reliance can pose to cyclists.
Reference
Ming Hou, Karthik Mahadevan, Sowmya Somanath, Ehud Sharlin, Lora Oehlberg. Autonomous Vehicle-Cyclist Interaction: Peril and Promise. In Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI 2020)ACM, New York, NY, USA Page: 1-12. DOI: https://doi.org/10.1145/3313831.3376884