Improvising with an Audience-Controlled Robot Performer
Claire Mikalauskas , Tiffany Wun , Kevin Ta , Joshua Horacsek ,  Lora Oehlberg
Lora Oehlberg
Abstract
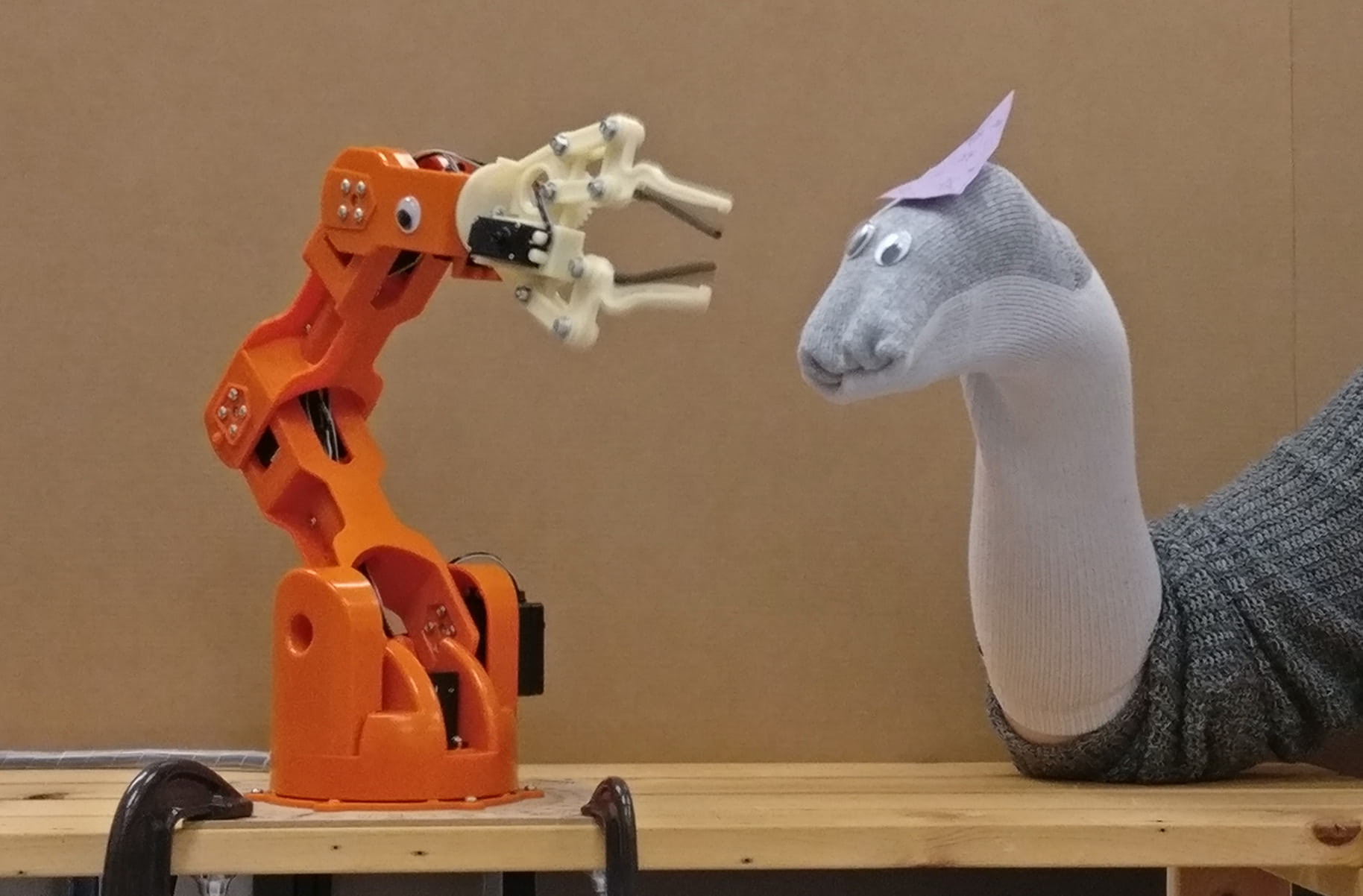
In improvisational theatre (improv), actors perform unscripted scenes together, collectively creating a narrative. Audience suggestions introduce randomness and build audience engagement, but can be challenging to mediate at scale. We present Robot Improv Puppet Theatre (RIPT), which includes a performance robot (Pokey) who performs gestures and dialogue in short-form improv scenes based on audience input from a mobile interface. We evaluated RIPT in several initial informal performances, and in a rehearsal with seven professional improvisers. The improvisers noted how audience prompts can have a big impact on the scene - highlighting the delicate balance between ambiguity and constraints in improv. The open structure of RIPT performances allows for multiple interpretations of how to perform with Pokey, including one-on-one conversations or multi-performer scenes. While Pokey lacks key qualities of a good improviser, improvisers found his serendipitous dialogue and gestures particularly rewarding.
Reference
Claire Mikalauskas, Tiffany Wun, Kevin Ta, Joshua Horacsek, Lora Oehlberg. Improvising with an Audience-Controlled Robot Performer. In Proceedings of the ACM on Designing Interactive Systems Conference (DIS 2018)ACM, New York, NY, USA Page: 1-10. DOI: https://doi.org/10.1145/3196709.3196757