Perspective on and Re-orientation of Physical Proxies in Object-Focused Remote Collaboration
 Martin Feick, Terrance Tin Hoi Mok,
Martin Feick, Terrance Tin Hoi Mok,  Anthony Tang,
Anthony Tang,  Lora Oehlberg,
Lora Oehlberg,  Ehud Sharlin
Ehud Sharlin
Abstract
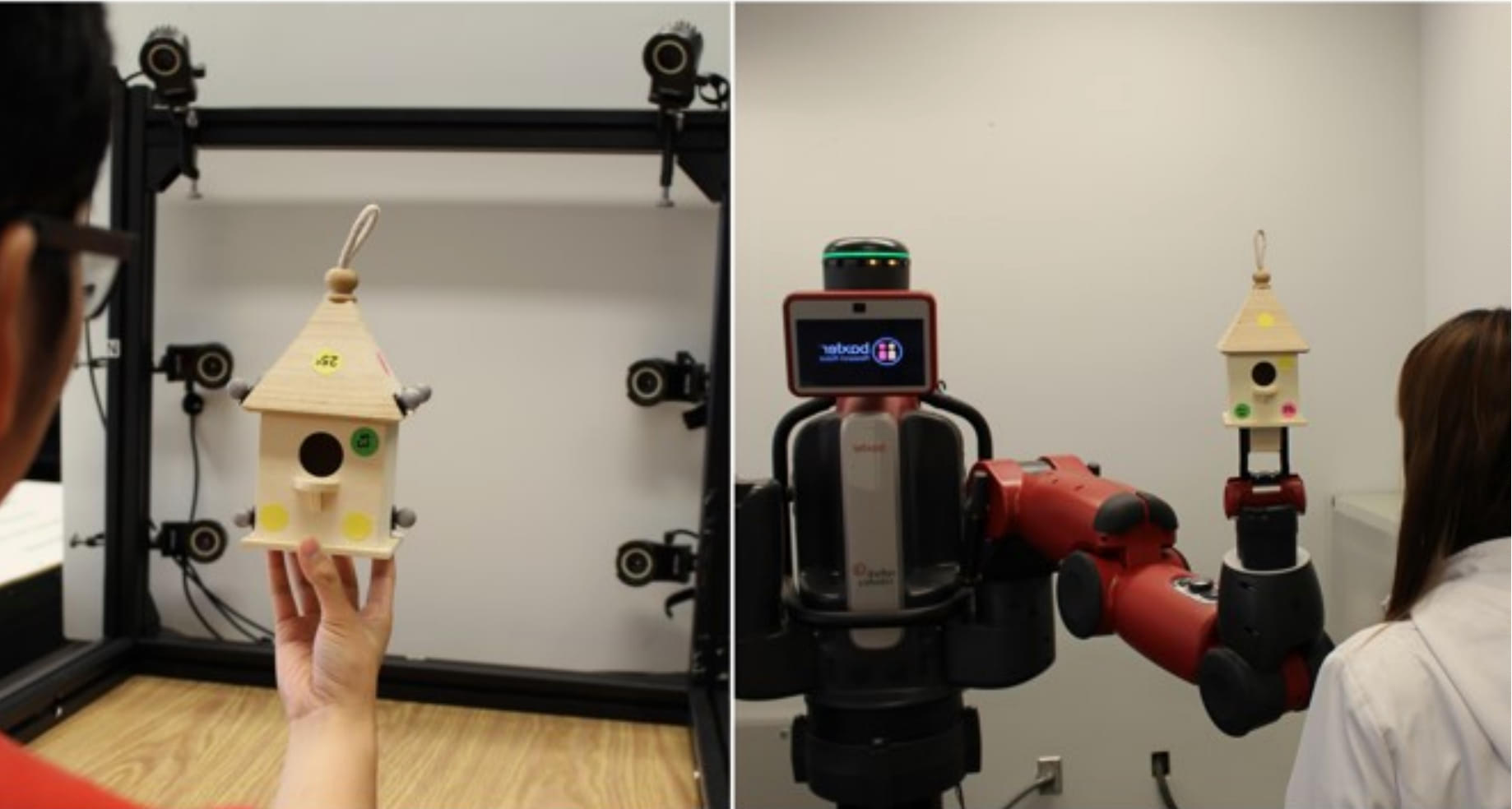
Remote collaborators working together on physical objects have difficulty building a shared understanding of what each person is talking about. Conventional video chat systems are insufficient for many situations because they present a single view of the object in a flattened image. To understand how this limited perspective affects collaboration, we designed the Remote Manipulator (ReMa), which can reproduce orientation manipulations on a proxy object at a remote site. We conducted two studies with ReMa, with two main findings. First, a shared perspective is more effective and preferred compared to the opposing perspective offered by conventional video chat systems. Second, the physical proxy and video chat complement one another in a combined system: people used the physical proxy to understand objects, and used video chat to perform gestures and confirm remote actions.
Reference
Martin Feick, Terrance Tin Hoi Mok, Anthony Tang, Lora Oehlberg, Ehud Sharlin. Perspective on and Re-orientation of Physical Proxies in Object-Focused Remote Collaboration. In Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI 2018)ACM, New York, NY, USA Page: 1-13. DOI: https://doi.org/10.1145/3173574.3173855